The Neuroscience of Touch:
from finger skin deformation to perception
Workshop at the IEEE World Haptics Conference 2019
Tokyo, Japan
July 9th, 2019
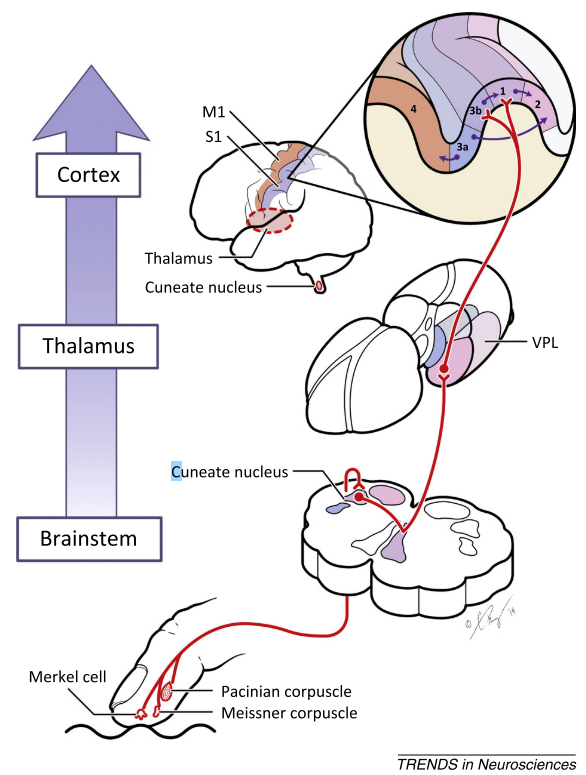
For a mechanical deformation of the skin to become a conscious percept, it must first be encoded by the peripheral nervous terminations in the fingers, the mechanoreceptors. The nature of the object, the complex geometry and mechanics of the skin, and the mechanoreceptors location and innervation patterns shape the encoded tactile signals. These signals then travel along the nerves, ascend the spinal cord and are processed by multiple brain structures including the brainstem nuclei and thalamus, before reaching primary cortical areas, implementing numerous recurrent networks. Those networks extract relevant features to culminate in shape, size, weight, pleasantness, and slippery percepts. Therefore, a sensory signal originating from the skin mechanoreceptors must travel across a series of neural structures before being felt as an object existing outside the body.
The goal of this workshop is to gather a panel of experts who have brought novel insights on the connection between fingertip mechanics and tactile perception.
Organized by:
Jean-Louis THONNARD (University of Louvain, Belgium),
Vincent HAYWARD (Sorbonne Université, Actronika SAS, France),
and Cagatay BASDOGAN (KocUniversity, Istanbul, Turkey).
Program at a glance
08:45 - 09:00 - Workshop introduction
09:00 - 09:30 - How frictional properties of a surface influence skin deformation on initial contact
Laurence Willemet (PhD Student - Biorobotics Lab - CNRS/Aix-Marseille Université)
Michael Wiertlewski (Assistant Professor - Department of Cognitive Robotics - TU Delft)
09:30 - 10:00 - Human tactile afferent responses during the onset of slip
Benoit Delhaye (FSR Postdoc Fellow, UCLouvain, Belgium)
10:00 - 10:30 - Active and passive friction sensing mechanisms for dexterous object manipulation
Ingvars Birznieks (Associate Professor, School of Medical Sciences, Faculty of Medicine, UNSW Sydney, Australia)
10:30 - 10:45 - Coffee break
10:45 - 11:15 - Tactile waves and efficient spatiotemporal encoding in the human hand
Yon Visel (Assistant Professor, University of California, Santa Barbara, USA)
11:15 - 11:45 - Towards neuronal circuitry mechanisms underlying perceptual constancy in haptics
Henrik Jörntell (Professor, Department of Experimental Medical Science, Lund, Sweden)
11:45 - 12:15 - Discriminative & Affective Touch: Two Sense – Two Systems
Francis McGlone (Professor, University of Liverpool, UK)
12:15 - 12:30 - Closing
Abstracts
How frictional properties of a surface influence skin deformation on initial contact
Laurence Willemet (PhD Student - Biorobotics Lab - CNRS/Aix-Marseille Université)
Michael Wiertlewski (Assistant Professor - Department of Cognitive Robotics - TU Delft)
Humans have a fantastic ability to quickly assess the slipperiness of an object via touch. This ability is particularly useful for grasping and manipulating as it dictates the amount of grip force needed to support a load via friction. Yet the slipperiness of the surface is often assessed by the nervous system well before a net frictional force is observed on the finger. Simultaneous imaging of both the intimate contact and the skin deformation reveals how friction influences the motion of the skin during the instant of contact and might be at the origin of the neural encoding of the frictional properties of a surface.
Human tactile afferent responses during the onset of slip
Benoit Delhaye - FSR Postdoc Fellow, UCLouvain, Belgium
During manipulation, humans adjust the amount of force applied to an object depending on friction: they exert a stronger grip for slippery surfaces and a looser grip for sticky surfaces. However, the neural mechanisms signaling friction remain unclear. To fill this gap, we recorded the response of human tactile afferent during the onset of slip against flat surfaces of different frictions. We observed that some afferents responded to partial slip events occurring during transition from a stuck to a slipping contact, and potentially signaling the impending slip.
Active and passive friction sensing mechanisms for dexterous object manipulation
Ingvars Birznieks - Associate Professor, School of Medical Sciences, Faculty of Medicine, UNSW Sydney, Australia
Frictional information signaled by cutaneous mechanoreceptors is crucial in order to coordinate fingertip forces so that delicate objects are held without slipping or being crushed by excessive force. Experiments have demonstrated that when gripping objects with different surface materials possessing different frictional properties, grip force adjustments to the frictional condition can be seen as soon as 100 ms after the initial contact is made. However, it is not clear whether such initial grip force adjustments are based on our sensory inputs signaling friction or on recognition of surface structure, thus relying on the anticipatory parameter control. By combining various experimental and analytical methods, comprised of neural recordings, biomechanical analyses, psychophysics, and behavioral experiments, our aim is to reveal the sensory mechanisms and the role of motor strategies (active touch) underlying initial adjustments to friction. Furthermore, we provide evidence that, while holding and object, tactile afferents can signal, with high precision, the reserve load bearing capacity of the employed grip force which might be sufficient to fine tune adjustments to friction ensuring grip safety and preventing loss of an object due to a slip.
Tactile waves and efficient spatiotemporal encoding in the human hand
Yon Visel - Assistant Professor, University of California, Santa Barbara, USA
The simplest of tactile interactions elicit mechanical waves in the human hand that exhibit great variety and complexity. This wave physics pre-neuronally filters tactile inputs to the hand, much as sound is processed by the cochlear mechanics of the inner ear. I will review our recent findings that the information content in these signals can be captured by a compact lexicon of spatiotemporal primitives and discuss implications for tactile perception.
Towards neuronal circuitry mechanisms underlying perceptual constancy in haptics
Henrik Jörntell - Professor, Department of Experimental Medical Science, Lund, Sweden
In biology, the perception of haptics interactions depends on two factors, the spatiotemporal pattern of skin sensor activation that the interaction results in and the decoding mechanisms for that spatiotemporal pattern in neocortical circuitry. However, normal, unconstrained haptics interactions activate several thousand skin sensors, each responding with a finely resolved temporal modulation of their spike output frequency. But because of this complexity, and the fact that biological movements are not based on precision control, seemingly identical haptic interactions will probably never induce exactly the same spatiotemporal pattern of skin sensor activation. Yet, our perception of the haptics interaction will be the same. The question asked here will be how this can come about. The question is addressed by analyzing neocortical neuronal responses in rats experiencing a set of artificially fixed, and only slightly different, spatiotemporal patterns of skin sensor activation.
Discriminative & Affective Touch: Two Sense – Two Systems
Francis McGlone - Professor, University of Liverpool, UK
The sense of touch is mostly recognised for its ability to discriminate the presence, shape, texture and temperature of objects encountered in the immediate environment, and in some mammals, to manipulate objects. This sense of touch requires rapid transmission of sensory information into the CNS and is therefore sub served by fast conducting myelinated nerves. However, the domination within somatosensory research to focus on these wide-ranging and ‘here & now’ functions of touch has been at the expense of another important property of touch: it can also be rewarding/pleasant. This often-ignored aspect of tactile sensation is at the heart of the social domain, allowing positive hedonic experience ranging from the reassurance of a pat on the back to the rills of a sensual caress. The relatively recent discovery in humans of a ‘slow’ system of mechanosensitive unmyelinated nerves found in the skin of the body (and not the palmar skin of the hands) has provided insight into a second sense of touch - an affective rather than discriminative one.
Organizers
Professor Jean-Louis THONNARD (University of Louvain, Belgium),
Prof. Thonnard is an accomplished expert in the field of fingertip biomechanics and dexterous manipulation of objects. His main research interests are tactile spatial resolution and tactile roughness discrimination, mechanical properties of fingertip-object contact, dynamics of precision grip during object manipulation, dexterous manipulation in Microgravity. He is Professor at the Institute of Neuroscience of UCLouvain in Belgium. He has more than130 refereed scientific papers (Total number of citations in January 2019: 5006; h-index: 39; Source: Google Scholar).
Professor Vincent HAYWARD (Sorbonne Université, Actronika SAS, France)
Prof. Hayward is interested by the astonishing variety of phenomena resulting from the contact between fingers and objects, which he regards as a trove of information that can be extracted to learn about the nature and the properties of objects. This variety is likely to have fashioned our somatosensory system at all levels of its organisation, from early mechanics to cognition. Vincent Hayward just completed a visiting Professorship of Tactile Perception and Technology at the School of Advanced Studies of the University of London, supported by a Leverhulme Trust Fellowship, following a period as an advanced ERC grantee at Sorbonne Université. He currently spends part of his time contributing to the development of a start-up company in Paris, Actronika SAS, dedicated to lowering the accessibility barrier of haptic technology. optional statistics: He has published in Nature (2), PNAS (3), Neuron (1), Current Biology (3), Phil. Trans. R. Soc. B (2), Phil. Trans. R. Soc. A (1), Scientific Reports (5), and supervised 28 PhDs and 16 post-docs; h-index: 59; Source: Google Scholar.
Professor Cagatay BASDOGAN (Koc University, Istanbul, Turkey)
Prof. Basdogan is a member of faculty in College of Engineering at Koc University since 2002. Before joining to Koc University, he was a senior member of technical staff at Information and Computer Science Division of NASA-Jet Propulsion Laboratory of California Institute of Technology (Caltech) from 1999 to 2002. At JPL, he worked on 3D reconstruction of Martian models from stereo images captured by a rover and their haptic visualization on Earth. He moved to JPL from Massachusetts Institute of Technology (MIT) where he was a research scientist and principal investigator at MIT Research Laboratory of Electronics and a member of the MIT Touch Lab from 1996 to 1999. At MIT, he was involved in the development of algorithms that enable a user to touch and feel virtual objects through a haptic device. He received his Ph.D. degree from Southern Methodist University in 1994 and worked on medical simulation and robotics for Musculographics Inc. at Northwestern University Research Park for two years before moving to MIT. Prof.Basdogan is currently the associate editor in chief (AEiC) of the IEEE Transactions on Haptics and serves in the editorial boards of IEEE Transactions on Mechatronics, Presence: Teleoperators and Virtual Worlds (MIT Press), and Computer Animation and Virtual Worlds (Wiley) journals. In addition to serving in the program and organizational committees of several conferences, he also chaired the IEEE World Haptics Conference in 2011.